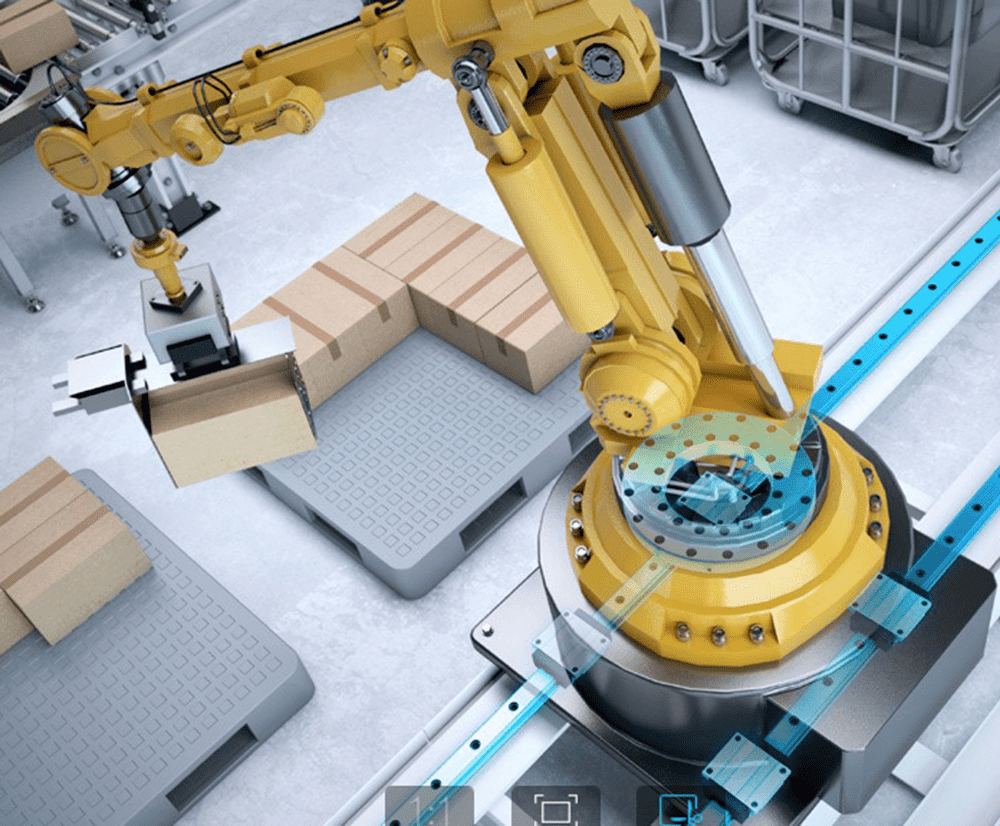
השימוש הנרחב ברובוטים תעשייתיים במפעלים אוטומטיים שיפר משמעותית את יעילות הייצור. מנגנון הליבה של רובוט תעשייתי הוא זרוע מכנית. התכנון המבני הרב-דק-של החופש מאפשר לזרוע הרובוטית להיות גמישות גבוהה במיוחד. זה יכול לאתר במדויק נקודות ולעבור לפי מסלול נתון בחלל. מנגנון הסיבוב של הזרוע המכנית משתמש כיום בצילינדר הידראולי סיבוב או במנוע סרוו כדי לממש את הפעולה הסיבובית באמצעות אמיסב טבעת.
מיסב מורחידוע גם בשםמיסב טבעת,מיסב פטיפון.ברורהטַבַּעַתמֵסַביכול לעבוד כרגיל בטמפרטורה של -30 ℃ עד +70 ℃, ואנחנו יכולים לתכנן סוג מיוחד כצורך של לקוח.
מיסב הטבעת ההרוגממלא תפקיד חיוני בפיתוח רובוטים תעשייתיים, ולכן הוא ידוע כ"מפרק המכונה ". רובוטים תעשייתיים נמצאים בשימוש נרחב בסדנאות ייצור. בשל דרישות הדיוק שלהם, הרובוטים התעשייתיים המודרניים הם נושאים טבעת שכיחים בדרך כלל משתמשיםרולר חוצהמיסב טבעת. שוז'ו וונדהSlewing Bearing Co., Ltd.יש את סדרת הדגם 11 שלמיסב טבעתיכול לעמוד בשימוש זה.

זמן הודעה: מאי -11-2020